Smart HIL™
선박과 해양플랜트에서 심해 작업을 위해 필요한 DP(Dynamic Positioning) 설비를 소프트웨어적으로 테스트 하기 위한 표준 기술을 제공하는 시뮬레이터입니다.
Smart HIL Simulator (for DPS (Dynamic Positioning System))는 선박 및 해양플랜트 내 설치되어 있는 DP (Dynamic Positioning) System을 대상으로 HIL (Hardware In Loop) 테스트를 수행하기 위하여 개발한 시뮬레이터입니다. 본 시뮬레이터는 DPS HIL 테스트를 위하여 DPC (DP Controller)와 상호 확인된 인터페이스 통신 시스템을 구성하여 시뮬레이터와 DPC간 Closed loop 시스템으로 구성한 후, 시뮬레이터에서 외부 환경 변수들을 입력하고, 입력된 정보를 기반으로 DPC에서는 Thrust 동적 할당을 통한 DPC의 동적 위치를 제어하기 위한 각 기능들에 대한 테스트를 수행할 수 있도록 구성되어 있습니다.
외부 환경 데이터 입력
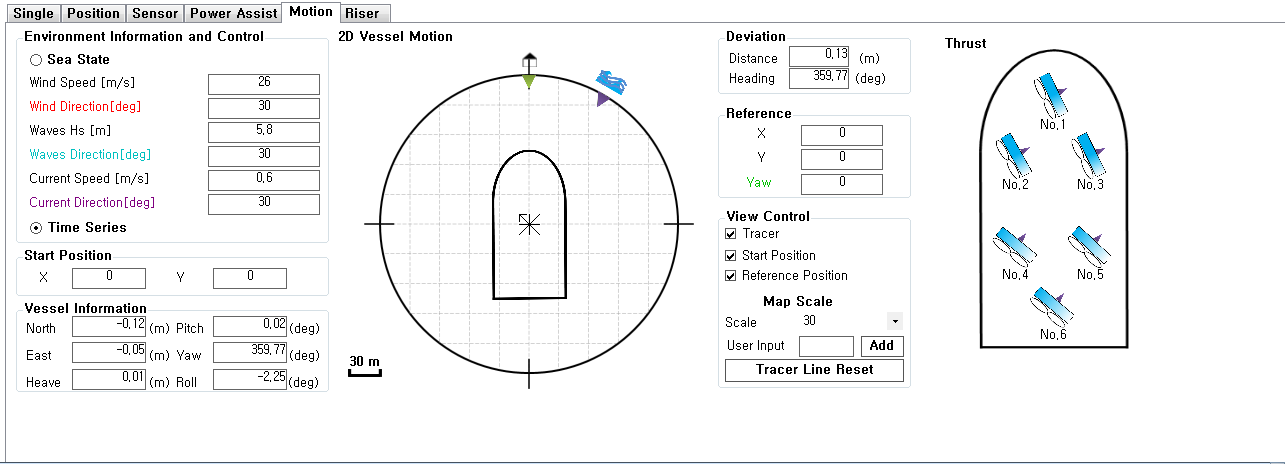
DPS를 HIL 테스트하기 위해서는 기본적으로 외력 정보를 넣어 줄 수 있는 외부 환경 데이터 입력 기능이 필요합니다. 외부 환경 데이터 정보로는 기본적으로 풍향/풍속, 파고/파향, 조향/조속 정보가 있으며, 본 외부 환경 데이터 입력 기능에는 현재 Vessel의 위치 정보 및 각 Thruster의 추력과 방향에 대해서도 표시가 됩니다.
명령/응답 변조
실제 HIL 테스트를 수행하기 위하여 Closed loop간 정상적인 신호뿐만 아니라 상호 데이터의 In/Out 데이터의 변조값을 넣었을 때에 대한 반응을 보는 것도 중요한 테스트 방법 중의 하나입니다. 따라서, 본 시뮬레이터에서는 다양한 데이터 변조 방법을 사용하고 있으며, 변조 방법에 대해서는 HIL 테스트 수행 검증을 수행하는 선급 Rule에 자세히 나와 있습니다. 아래는 DNVGL 선급 Rule에 있는 다양한 변조 방법에 대한 내용을 표시한 것이며, 본 시뮬레이터에서는 아래와 같은 변조 방법에 대한 기능이 모두 포함되어 있으며, 복합적으로 변조를 줄 수 있는 방법도 구현되어 있습니다.
데이터 모니터링 및 Plotting
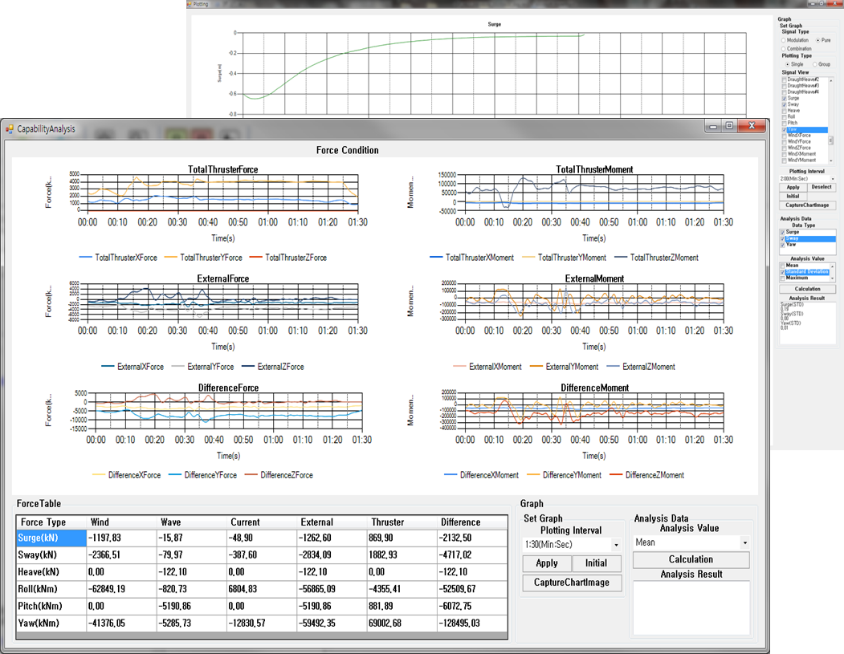
HIL 테스트 수행시 가장 중요한 요소 중 하나는 모든 입/출력 데이터들에 대한 Raw 신호, 변조된 신호들에 대한 데이터의 신뢰성을 확인하는 것이 중요합니다. 따라서, 실제 테스트 수행하는 과정 중 실제 입력되는 값과 테스트를 위하여 변조된 값을 입력하여 각 Controller가 변조된 값에 어떻게 반응하는지에 대한 기능을 확인하고, 확인된 결과에 따라 테스트의 결과가 달라질 수 있습니다. 이러한 이유로 인하여 모든 HIL 테스트를 위해서는 Raw 신호, 변조 신호들을 비교, 확인할 수 있는 Plotting 기능이 필수적으로 구현되어야만 합니다. 위 그림은 본 시뮬레이터에 포함되어 있는 Plotting 기능을 표시한 것이며, 각 표시되는 시간적 구간에 따른 최소/최대 값, 평균 값 등을 표시할 수 있도록 구성되어 있습니다.
입출력 데이터 저장
HIL Test를 수행하는 경우, 실제 선박 또는 해양플랜트에 설치되어 실해역에서 운용되는 제어기를 기반으로 테스트를 수행하기 때문에 HIL Test 수행시 발생하는 입력/출력 데이터의 신뢰성이 가장 중요합니다. 따라서, 본 시뮬레이터에서는 모든 HIL 테스트 수행에 대한 입력/출력 데이터를 저장하여 향후 발생할 수 있는 논쟁에 대한 근거로 활용합니다. 또한, 향후 시뮬레이터 개선을 위한 데이터로 활용합니다.